The EVIMO2 Dataset
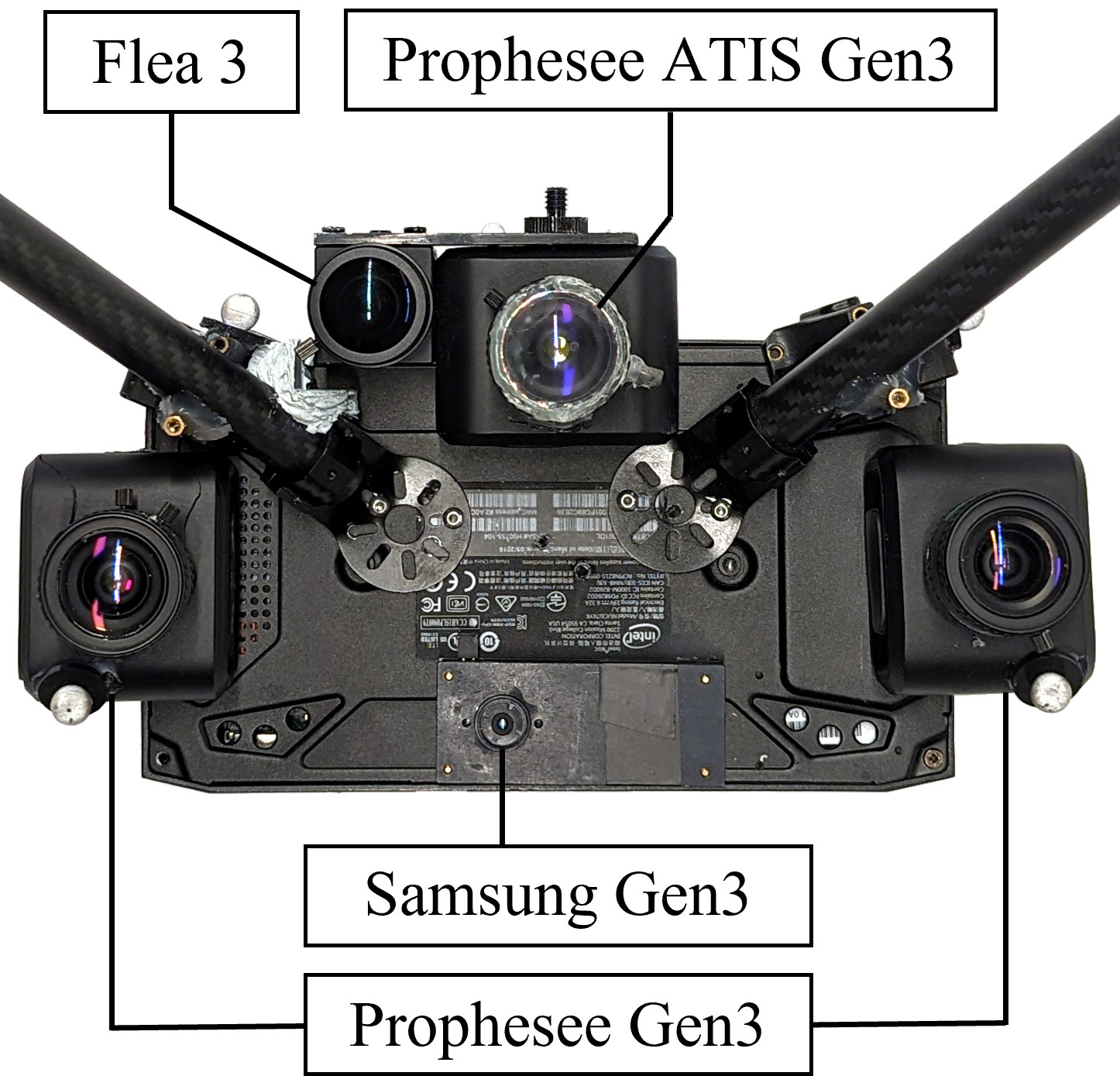
The Recording Setup
Prophesee Cameras (×2)
- Resolution: 640×480
- FOV: ~70°
Samsung DVS Gen3
- Resolution: 640×480
- FOV: ~75°
Flea3 (RGB)
- Resolution: 2080×1552
- FOV: ~65°
Prophesee Atis Gen3 (not used)
Below are download links for EVIMO2 version 1. New projects should use EVIMO2 version 2 for several reasons.
Please refer to our documentation for detailed instructions on how to read and parse the data.
The authors would appreciate if you cite our papers:
A tabletop scenario (shot with all 4 cameras up-close) with up to 20 objects moving independently from the camera. Pixelwise masks, depth maps and trajectories are provided. This dataset is also suitable for object recognition tasks. The ROS bags are here .
| Camera | Download Links | Preview (hover for animation) |
|---|---|---|
| flea3_7 |
data .npz data .txt |
|
| left_camera |
data .npz data .txt |
 |
| right_camera |
data .npz data .txt |
 |
| samsung_mono |
data .npz data .txt |
 |
The sequences feature a variety of objects scattered on the tabletop, but the scene is rigid (no independent motion). The objects provide depth variation and some degree of diversity from recording to recording, and additionally allow to evaluate object recognition algorithms (pixelwise masks are provided). The ROS bags are here
| This Camera | Download Links | Preview (Hover for animation) |
|---|---|---|
| flea3_7 |
data .npz data .txt |
 |
| left_camera |
data .npz data .txt |
 |
| right_camera |
data .npz data .txt |
 |
| samsung_mono |
data .npz data .txt |
 |
These sequences were shot in low light - they feature high amounts of noise for event cameras and can be extremely challenging. The ROS bags are here
| Camera | Download Links | Preview (Hover for animation) |
|---|---|---|
| flea3_7 |
data .npz data .txt |
 |
| left_camera |
data .npz data .txt |
 |
| right_camera |
data .npz data .txt |
|
| samsung_mono |
data .npz data .txt |
 |
The following recordings contain primitive scenarios with rudimentary motions and are provided primarily for sanity testing, benchmarking and debugging of software.
| Camera | Download Links | Preview (Hover for animation) |
|---|---|---|
| flea3_7 |
data .npz data .txt |
 |
| left_camera |
data .npz data .txt |
 |
| right_camera |
data .npz data .txt |
 |
| samsung_mono |
data .npz data .text |
 |
| Camera | Download Links | Preview (Hover for animation) |
|---|---|---|
| flea3_7 |
data .npz data .txt |
 |
| left_camera |
data .npz data .txt |
 |
| right_camera |
data .npz data .txt |
 |
| samsung_mono |
data .npz data .txt |
 |